
ตัวปรับตำแหน่งแบบใช้มอเตอร์
อุปกรณ์แก้ไขความคลาดเคลื่อนของสายพานลำเลียงอัตโนมัติ
คลิกที่นี่เพื่อดาวน์โหลดเอกสาร
อุปกรณ์แก้ไขความคลาดเคลื่อนของสายพานลำเลียงอัตโนมัติ
คลิกที่นี่เพื่อดาวน์โหลดเอกสาร

ระบบปรับแนวสายพานลำเลียงอัตโนมัติด้วยมอเตอร์ เป็นอุปกรณ์ความปลอดภัยที่ออกแบบมาเพื่อแก้ไขการเบี่ยงเบนของสายพานลำเลียงโดยอัตโนมัติในระหว่างการทำงาน โดยการปรับตำแหน่งการติดตามของสายพานแบบเรียลไทม์ ทำให้การเคลื่อนที่ของสายพานมีเสถียรภาพภายในขอบเขตที่ปลอดภัย ลดเวลาหยุดทำงาน และป้องกันความเสียหายที่เกิดจากการสัมผัสขอบสายพานลำเลียง ระบบนี้ช่วยให้สามารถควบคุมการจัดแนวได้อย่างต่อเนื่องและเชื่อถือได้โดยไม่ขัดจังหวะการผลิต
คาดว่าระบบจะต้องทำงานอย่างต่อเนื่องแม้ว่าสายพานลำเลียงประเภทนี้จะมีปัญหาเรื่องการเบี่ยงเบนหรือการไม่ตรงแนวก็ตาม
สามารถลดต้นทุนที่ไม่จำเป็นอันเนื่องมาจากการหกของวัสดุ ความเสียหายของสายพาน ความเสียหายของโรงงาน การหยุดทำงาน ฯลฯ ได้
สามารถลดภาระงาน (งานบำรุงรักษา งานซ่อมแซม ฯลฯ ที่เกิดจากปัญหาการเลื่อนของสายพาน) ได้ เนื่องจากคาดว่าจะสามารถใช้งานได้อย่างต่อเนื่อง


มีแรงปรับที่ดีกว่าตัวลำเลียงแบบปรับแนวอัตโนมัติเชิงกล เนื่องจากใช้มอเตอร์ในการทำงาน มีประสิทธิภาพสำหรับสายพานลำเลียงในพื้นที่ที่ยากลำบาก ซึ่งตัวลำเลียงเชิงกลทำงานได้ไม่ดี

ระบบติดตั้งด้านส่งกลับมีให้เลือกใช้เช่นเดียวกับระบบติดตั้งด้านตัวลำเลียง
ตำแหน่งการติดตั้งที่มีประสิทธิภาพอาจแตกต่างกันไปตามสภาพพื้นที่ และเราพร้อมที่จะจัดหาระบบที่เหมาะสมให้
สามารถใช้ได้กับสายพานลำเลียงแบบกลับทิศทางได้เช่นกัน โดยต้องใช้งานร่วมกับชุดรีเลย์เสริมสำหรับสายพานลำเลียงแบบกลับทิศทาง
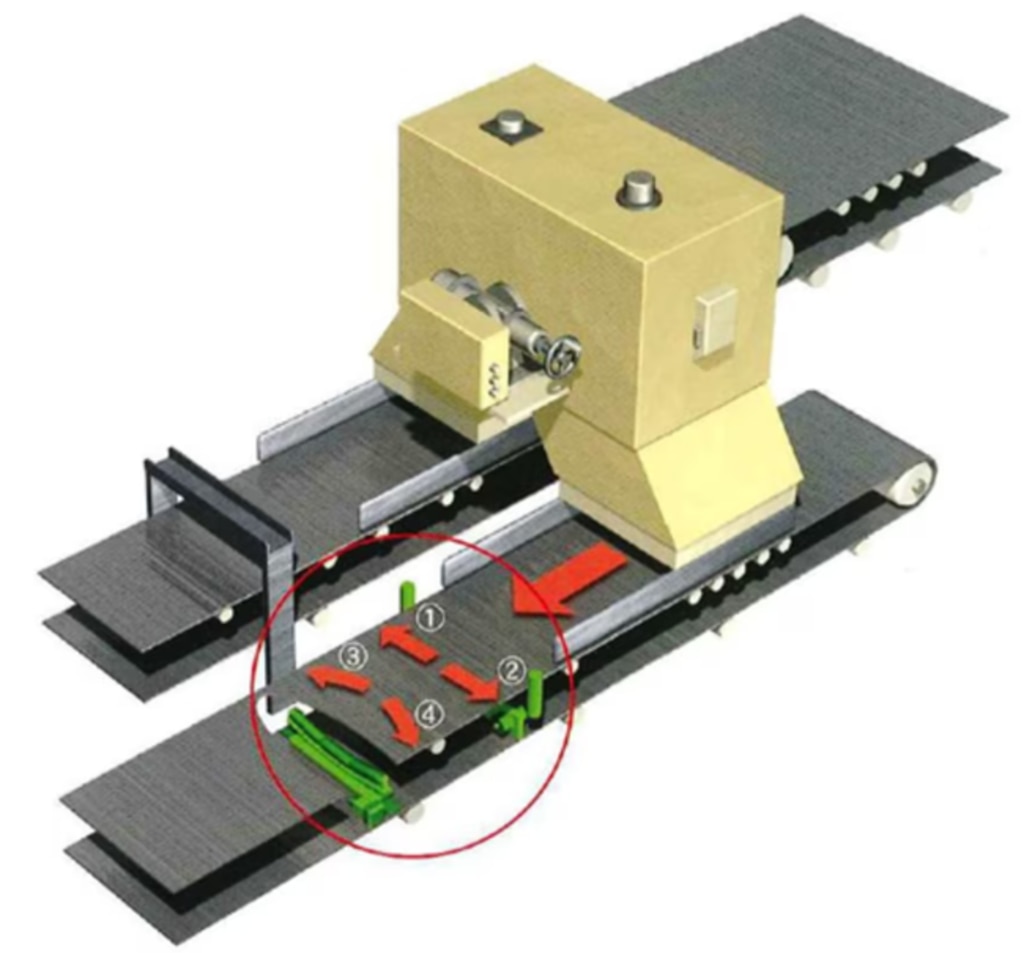
ตัวปรับสายพานที่ทำงานด้วยมอเตอร์จะตรวจจับการเบี่ยงเบน (การบิดเบี้ยว) ของสายพานโดยใช้ตัวตรวจจับอย่างน้อยหนึ่งตัวที่มีรอกสัมผัสติดตั้งอยู่ใกล้กับสายพานลำเลียง
เมื่อรอกสัมผัสของตัวตรวจจับตรวจพบว่าสายพานเลื่อนไปด้านข้าง โพเทนชิออมิเตอร์ภายในจะสร้างสัญญาณตามสัดส่วนของมุมการเบี่ยงเบน
สัญญาณนี้จะถูกส่งไปยังตัวขับเคลื่อนไฟฟ้า ซึ่งจะขับเคลื่อนลูกกลิ้งของตัวปรับสายพานผ่านมอเตอร์ให้หมุนไปในทิศทางที่แก้ไขการเบี่ยงเบน
ระบบจะปรับตัวปรับสายพานต่อไปจนกว่าจะได้แนวที่ถูกต้อง หากตัวตรวจจับตัวใดตัวหนึ่งหยุดตรวจจับการเบี่ยงเบนก่อนที่สายพานจะได้รับการแก้ไขอย่างสมบูรณ์ ตัวขับเคลื่อนจะยังคงหมุนต่อไปจนกว่าตัวตรวจจับอีกตัวจะยืนยันแนวที่ถูกต้อง ทำให้มั่นใจได้ว่าการแก้ไขอัตโนมัติมีความน่าเชื่อถือ
ชุด | แบบจำลองหลัก | หมายเหตุ |
HAB-MC Series | HAB-MC-****** | การติดตั้งด้านข้างตัวลำเลียง (****** = ความกว้างของสายพาน มุมราง และแหล่งจ่ายไฟ) |
HAB-MR Series | HAB-MR-****** | การติดตั้งด้านส่งกลับ (****** = ความกว้างของสายพาน มุมราง และแหล่งจ่ายไฟ) |
HAB-DC Series | HAB-DC-****** | ตัวตรวจจับพร้อมฐานยึด (****** = ความกว้างของสายพาน มุมราง และแหล่งจ่ายไฟ) |
HBVL Series | HBVL-5H | เฉพาะตัวตรวจจับ, ประเภทการยึดแบบหมุน |
HBVL-5A | เฉพาะตัวตรวจจับ แบบหมุนและกลับสู่ตำแหน่งเดิมโดยอัตโนมัติ |
สำหรับรายละเอียดเพิ่มเติม โปรดคลิกด้านล่าง [แคตตาล็อกสินค้า], [แบบร่าง/คู่มือ] หรือสอบถามเราผ่านทาง [คำถามและข้อสงสัย]
หากคุณมีคำถาม ข้อสงสัย หรือต้องการความช่วยเหลือ โปรดอย่าลังเลที่จะติดต่อเราได้เลย
คลิกที่นี่เพื่อดาวน์โหลดเอกสาร
หากมีคำถามใดๆ โปรดคลิกที่นี่
เกร็ดความรู้ แนวโน้ม หรือข้อมูลต่างๆ โดยส่วนใหญ่เกี่ยวข้องกับเทคโนโลยี
คำถามที่พบบ่อย
สามารถรับชมบันทึกการสัมมนาออนไลน์ได้ฟรี
© Matsushima Measure Tech

